Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation Aleksandar Haber PhD 16:12 1 year ago 8 515 Далее Скачать
Controlling many differential-drive robots with uniform control inputs IJRR Multimedia 0:54 9 years ago 206 Далее Скачать
Control of Mobile Robots- 2.2 Differential Drive Robots mouhknowsbest 8:13 11 years ago 110 685 Далее Скачать
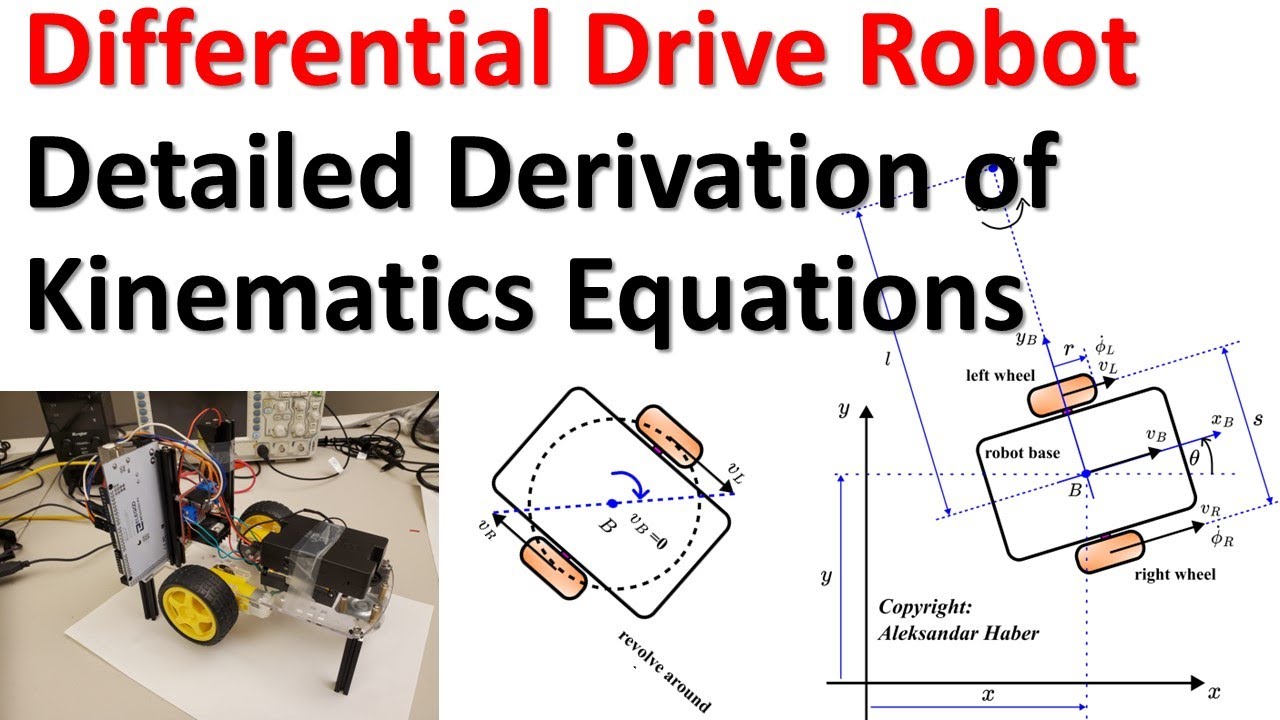
Detailed and Correct Derivation of Kinematics Equations of Differential Drive Mobile Robot Aleksandar Haber PhD 16:28 1 year ago 10 792 Далее Скачать
Autonomous differential drive robot obstacles avoidance and path tracking TODAYS TECH 0:23 1 year ago 74 Далее Скачать
What is the difference between Tesla's Optimus Robot and Sophia the Robot? Science online 1:56 2 days ago 298 Далее Скачать
Feedback Control of Many Differential-Drive Robots with Uniform Control Inputs Aaron Becker 1:55 12 years ago 1 429 Далее Скачать
Distance and Formation Angle Decentralized Control in Differential-Drive Mobile Robots ADRC Approach Mario Ramirez Neria 1:35 2 years ago 135 Далее Скачать
Differential Drive Robot Motion Planning and Path Tracking || MATLAB robot TODAYS TECH 2:52 1 year ago 148 Далее Скачать
Control of Differential-Drive Mobile Robots for Soft Object Deformation: Implementation Results Javier Felix-Rendon 0:17 4 years ago 37 Далее Скачать
Fuzzy auto-tuning of fractional PI and backstepping tracking control of a differential mobile robot GAIn - Ifes 4:11 6 years ago 198 Далее Скачать
Non linear MPC control for a differential drive robot with obstacle avoidance TODAYS TECH 3:01 1 year ago 193 Далее Скачать
Non linear MPC control for a differential drive robot with obstacle avoidance TODAYS TECH 1:30 1 year ago 150 Далее Скачать